���������㱼�ܻ����ˣ�����ɺ�շ�
������Ӣ��ý�屨�����ձ��о���Ա���չ�����һ��С�͵���������ˣ�����Ŀǰ�������н��ٶ����Ĵ��������֮һ��
��������������Ϊ“Achires”����“�Э������ͼ��������ʵ��ϵͳ”����д��������һ̨������������о���ʶ�𣬿���ʵ����ǰ�������ܶ�����ˤ����
������̨��������������������շ���������Ŷ����ʾ���ǵ�����Ŀ���������ܹ���Խ����ı��֡����Ʒ��ձ�������ѧ�Ŀ����Ŷӱ�ʾ��“���ǵ�Ŀ���ǣ�ͨ�����ϸ���Ӳ�������ϵͳ���ܣ����û�еϵͳӵ�г�Խ������ֵ����������ǻ���������Ŀ�꣬�������������ȫ�µ����㱼�ܻ�����ϵͳ��”
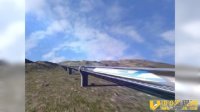
�����������������ȫ�µġ��ܶ����������˵Ŀ����л����һ����Ϊ“���˶���”��λ����ȷ�������ƽ�⣬��������ͻ������������һ̨�����������һ̨�ȶ��������ﵽ�ȶ����ƣ��Ӷ�ʵ�������ǰ���뱼�ܶ�����

С�͵����������
��������һ�������������˱����Լ������е���̬���б��ܶ�����������������ɷ���ĸ��Ӷ�����
����Ŀǰ���������Ѿ����������ж���ΪѸ�ٵ�������������֮һ�ˣ���ǰ���ٶȿ��ԴﵽÿСʱԼ4.2����о����ʾ��“���ø���ͼ������������ʶ�����ǵ��о�·���У����ٱ���Ӧ������Ϊ�����ĵ�һ����”��̨�����˵��ȳ���Լ��14���ף�ÿ���������6����

����������ɷ���ĸ��Ӷ���
�����о����ʾ��“������չʾ�л������˺�շ��Ķ�����”
��������֮�⣬�ڱ��ܵ�ʱ����̨������ͬʱ��չʾ����Ծ�������ڸ߸������ͬʱ�������������������������ڿ��и�����ת��
���������̨�����˻������������Ľ������������似�ܣ�ͬʱչʾ�����ʺ���������˵�������ս������Ŀǰ��̨�����˻�ֻ��һ������10�����ң����������������ӳ���������ʱ�䡣
��������о����ǰ�����ƹ�һ����Ϊ“janken”�Ļ����ˣ���ʹ�������������ֲ����������ҿ�����ʯͷ���Ӳ�����Ϸ�����ɻ�������������֡�
�������о���ָ��������̨������ȫ����������ͬ��ԭ������Ӳ���Լ����������ʶ��ϵͳ���漼���IJ�������δ�������ܰ���������ٶȸ��ߵĹ���װ�������˻����������Գ�Խ�����ٶȵĿƼ���

- ר�����з�����������Ȯ ����Ҫʧҵ 2014-09-29
- �̵������ѿƼ����ţ����λ����� 2014-09-29
- Ҫʧҵ�ˣ��п���ȡ���˵�9������� 2014-09-29
- �Ƽ�������ӭ�ӻ����˷�չ�Ļƽ�ʱ�� 2014-09-29
- �����ǡ������ˣ���������������ѹ 2014-09-29
- ������˾�ƶ��������������˻����� 2014-09-29
- ��ѧ������⣺��������Ŀ�ѧ�о� 2014-09-29
- ����������ĪҪ�� �������������ָ��֧���� 2014-09-29
- Ӣ��ѧ�����������г� ʱ��145���� 2014-09-29
- �������ӻ�����߶������� �������� 2014-09-29
- ��ѧ���з���ڲ��� �������пɼ��� 2014-09-29
- ��������ǿ�İ���������������˳ɹ��� 2017-05-26












- 1����Ů�������Ƶ,����Ů����뼵�Ӱ,����Ů��
- 2���������ֳ����Ů���ߺ�����
- 3�����ڼ�ͬ������ͼ;�����ڼ�����������Ӱ��̥
- 4�������8��Ů�ˣ��������������֣�
- 5����ͷ��ȫ��16����۵ķ���
- 6�й�ʽ�ҳ����е�ʮ��Ӳ�� ������û��
- 7������ӥ9�Ż�������������أ��㲻�ò�֪����
- 8���˱�֪���й�Ů������10������Ӳ��
- 9iphone8��ʲô��ɫ,ƻ��8����ʲô��ɫ
- 10������������:��������֤ʵ��Ӣɭ
- 1�����ʺͰ�����,�������������װ�İ����ͨ��
- 2����ӫ��è��ɵ���è�బ�̲�����
- 3�������С������� ������Ԫ����
- 4��δ�������˼�Ů������˾�ռ���
- 5����Ҫ1.5������Ϳ���������������
- 6�̵�ҽѧ��Ŀ�ѧ����������ݡ�������������
- 75ֻ��ͷ�������п�ƽ�����������
- 8������ţ�����Ϲ��ػ����ź� ���һǧ�İ���
- 9������Ŷ��������ϣ�����ɽ�������
- 10�������ҿ��������ܵ�½ͧ������ɴ