�˹����ܻ����˵ķ�չ֮���ϳ�Խ���˹�����(2)
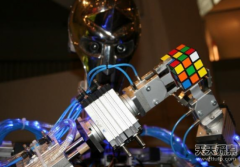
���������������ϸ�������оƬ��ЧЭ���Ĺ����壬����ʵ�ֲ��ֻ�ȫ����������ܡ����Ƶ�����������Ҫ��“ֲ�뷨”��“��ȡ��”���ַ�ʽ��“ֲ�뷨”���ǰ�ģ��������ĵ���оƬֲ�������壬�����������γ�Э�������壻“��ȡ��”���Ǵ�����������ȡ��ϸ����֯��ģ���������оƬ���ΪЭ�������塣
�о�����������Ŀ�ģ�����ϣ���Ʊ���һ��Э�������壬�Ӷ��������������Ч���ƣ�ʹ��Ϊ�������Ʃ�統������“9·11”�ֲ�Ϯ����������������������10�ֻ����˽��г��������;�Ԯ��������������6�ֻ������������̫����������͵��ֳ���չ����������һ�£�����������������������Ч�������ж������Ϊ��ʹ��Ϊ�����������ܱ��о���Ԯ�����˻��ѵ�ʱ�����Դ����һЩ��

δ���˹����ܻ���������ͼ
���������������������̿�չ������о���������Լ�“ֲ�뷨”���ձ�������ѧ�����о���һ�������Ƽ��������ǰ����ͷ�ϵĴ���ͳ���г�������缫���������ͺ��������ͨ��ң���źŲ�����̼���ʹ����ܹ������ض������н�������ŦԼ������ѧͨ������������ֲ����������Ҳ�ɹ�ʵ���˶������ת�䡢ǰ������������Ծ�ȶ������˹��Ƶ���
δ���˹����ܻ���������ͼ
�ҹ��ڵ�����������о���Ҳ��ͻ���Խ�չ���Ͼ����պ����ѧ���о���һ�ֱڻ����˹����Ƽ����������缫ֲ��ڻ����ڣ�ͨ����̼�ģ���������˶�����ͨ��“��ȡ��”�Ƶõ���������������Щ���Ƚ��д����Ե���Ӣ����ѧ���Ƴ���һ�������������֯���ƵĻ����ˣ���Ϊ“���”���ڸ����о��У�������Ա�ȴ��������Ϸ������ϸ����������ø��Һ�У�����Щ��ϸ���˴˷��룬Ȼ���ٽ���Щ��ϸ������Ӫ���ḻ���������С�

- ר�����з�����������Ȯ ����Ҫʧҵ 2014-09-29
- ���������㱼�ܻ����ˣ�����ɺ�շ� 2014-09-29
- �̵������ѿƼ����ţ����λ����� 2014-09-29
- �˹����ܼ������ٿ�����δ��ս���� 2014-09-29
- �ȸ���������оƬ�˹����ܸ��ӽ����� 2014-09-29
- ������˾�ƶ��������������˻����� 2014-09-29
- ��ѧ������⣺��������Ŀ�ѧ�о� 2014-09-29
- ��������ǿ�İ���������������˳ɹ��� 2017-05-26
- ����������ĪҪ�� �������������ָ��֧���� 2014-09-29
- �������ӻ�����߶������� �������� 2014-09-29
- ��ѧ���з���ڲ��� �������пɼ��� 2014-09-29
- Ӣ��ѧ�����������г� ʱ��145���� 2014-09-29












- 1����Ů�������Ƶ,����Ů����뼵�Ӱ,����Ů��
- 2���������ֳ����Ů���ߺ�����
- 3�����ڼ�ͬ������ͼ;�����ڼ�����������Ӱ��̥
- 4�������8��Ů�ˣ��������������֣�
- 5����ͷ��ȫ��16����۵ķ���
- 6�й�ʽ�ҳ����е�ʮ��Ӳ�� ������û��
- 7������ӥ9�Ż�������������أ��㲻�ò�֪����
- 8���˱�֪���й�Ů������10������Ӳ��
- 9iphone8��ʲô��ɫ,ƻ��8����ʲô��ɫ
- 10������������:��������֤ʵ��Ӣɭ
- 1����Ҫ1.5������Ϳ���������������
- 2����ӫ��è��ɵ���è�బ�̲�����
- 3�����ʺͰ�����,�������������װ�İ����ͨ��
- 4��δ�������˼�Ů������˾�ռ���
- 55ֻ��ͷ�������п�ƽ�����������
- 6�������С������� ������Ԫ����
- 7�������ҿ��������ܵ�½ͧ������ɴ
- 8������Ŷ��������ϣ�����ɽ�������
- 9�̵�ҽѧ��Ŀ�ѧ����������ݡ�������������
- 10������ţ�����Ϲ��ػ����ź� ���һǧ�İ���