��ʵ����ν�գ������������۵�����
������ý�屨�������źܶ����ڿ������ν�պ�Ի����˸��ӳ��ԡ�
�������ڣ��ɹ����ѧ�ͻ����˹���ʦɽķ-�Ѷ��ٺ�����?������쵼��һ���Ŷ����������һ�����͵Ļ�����
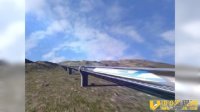
����һ�������ε�����ƽ�壬����������Զ��۵�Ϊһ����������ˣ������Լ����ߣ�������ƽ����̬�����Դ���ձ�����ֽ������
������Ϥ��ƽ����̬������һ����Ϊ“������ֽ”��������Ʒ��������ַ�������ʹ����ֽ�Զ��۵������ƶ����㡣

����ƽ�����������Զ��۵�Ϊһ�����������
�����о���Ա����ͨ���о�������ֽ��������Ƴ����ܹ��Զ��۵������ߵ�“���ν��”��
������������ֽ��ƣ�ѡ����һ�ֿ��������۵��������ȵ�ƽ����ֽ��״������������һֻ������
���������ѡ�ò��ϣ������˾��м��书�ܵ�����Ƭ�ģ������ڼ���ʱ�ı�����״��Ȼ��ʹ�ü����и����Ƭ���϶����Զ��۵������ͭ����ӡ��

������֯��Ҫһϵ�и��ӵĹ������
��������綯���͵�طֱ�����ڻ��������ࡣ
����һ����Դ��ʼ���磬�������ͻᾭ��һϵ�в�����ͭ����ӡ���м��ȣ�Ȼ��������۵��γɡ�
�����۵���ɺ�綯��ת�����֣������˱�����ߡ��о���Աϣ�����������������Ļ�������һ���ܹ���Ͷ��һ��ʮ����С�Ŀռ俪չ������Ԯ������
��������?�����Ϊ������һ������˵������������̿�����ȫ�Զ�����ʵ��������������װ��
�����о��Ŷ����о��������˸��Ӽ��ɵ�·��͵�أ����������о���Ҫ�������˽ṹ��Ƶظ�������ʵ���Զ�����
�����о���Ա�ƣ�Ҫ�û�������û�м����ָ�ӵ�����£�������֯��Ҫһϵ�и��ӵĹ�����ơ���չ����һ��“��̬����”�������ƣ�������Ʋ��ϵ���״��ʹ֮�����Զ����Ρ�

- ר�����з�����������Ȯ ����Ҫʧҵ 2014-09-29
- ���������㱼�ܻ����ˣ�����ɺ�շ� 2014-09-29
- �̵������ѿƼ����ţ����λ����� 2014-09-29
- Ҫʧҵ�ˣ��п���ȡ���˵�9������� 2014-09-29
- �Ƽ�������ӭ�ӻ����˷�չ�Ļƽ�ʱ�� 2014-09-29
- ������˾�ƶ��������������˻����� 2014-09-29
- ��ѧ������⣺��������Ŀ�ѧ�о� 2014-09-29
- ��������ǿ�İ���������������˳ɹ��� 2017-05-26
- ����������ĪҪ�� �������������ָ��֧���� 2014-09-29
- �������ӻ�����߶������� �������� 2014-09-29
- ��ѧ���з���ڲ��� �������пɼ��� 2014-09-29
- Ӣ��ѧ�����������г� ʱ��145���� 2014-09-29












- 1����Ů�������Ƶ,����Ů����뼵�Ӱ,����Ů��
- 2���������ֳ����Ů���ߺ�����
- 3�����ڼ�ͬ������ͼ;�����ڼ�����������Ӱ��̥
- 4�������8��Ů�ˣ��������������֣�
- 5����ͷ��ȫ��16����۵ķ���
- 6�й�ʽ�ҳ����е�ʮ��Ӳ�� ������û��
- 7������ӥ9�Ż�������������أ��㲻�ò�֪����
- 8���˱�֪���й�Ů������10������Ӳ��
- 9iphone8��ʲô��ɫ,ƻ��8����ʲô��ɫ
- 10������������:��������֤ʵ��Ӣɭ
- 1�̵�ҽѧ��Ŀ�ѧ����������ݡ�������������
- 2������Ŷ��������ϣ�����ɽ�������
- 3�������ҿ��������ܵ�½ͧ������ɴ
- 4�����ʺͰ�����,�������������װ�İ����ͨ��
- 5�������С������� ������Ԫ����
- 6����ӫ��è��ɵ���è�బ�̲�����
- 7������ţ�����Ϲ��ػ����ź� ���һǧ�İ���
- 8��δ�������˼�Ů������˾�ռ���
- 9����Ҫ1.5������Ϳ���������������
- 105ֻ��ͷ�������п�ƽ�����������